摘 要: 提出了一種基于PCC 的高可靠性智能勵磁調節器,它實現了用可編程計算機控制器模塊進行同步信號周期測
量、移相觸發脈沖形成,并采用基于模糊規則的適應式參數自調整PID 控制策略,從而使勵磁調節器具有移相精度高、調
節速度快、可靠性高等優點。電站試驗及運行表明,該調節器具有良好的動靜態特性。
關鍵詞: 同步發電機;勵磁調節器;PCC;模糊PID
1 前言
同步發電機勵磁調節器是水電站重要的基礎自動化設備,其質量的好壞直接影響到電能品質和電站安全及經濟運行,同時也影響電力系統的靜態穩定和動態穩定。現有同步發電機勵磁調節器一般均采用單片機或工業控制計算機實現。基于單片機的同步發電機微機勵磁調節器,其硬件為自行設計制造,且各廠家均為小批量生產,故元件檢測、篩選、老化處理、焊接及生產工藝等都受到限制,造成可靠性較低,運行中可能出現單片機死機,使同步發電機勵磁調節器失靈,從而使同步發電機勵磁調節器的可靠性大大降低,嚴重影響同步發電機勵磁裝置的安全可靠運行;基于工控機的微機勵磁調節器,其硬件標準化程度高,軟件資源豐富,有實時操作系統支持,運行速度快,實時性強,圖文顯示方便,但裝置訪問時間較長,體積大,且成本高,僅適合大型機組。可靠性較高的可編程邏輯控制器PLC 由于其難以滿足同步發電機勵磁調節器中同步信號周期測量及產生可控硅移相觸發脈沖的要求,而難以用于同步發電機勵磁裝置。因此,研制高可靠性、多功能的勵磁控制系統,并使之系列化、通用化、標準化是當前的發展趨勢[1 ] 。
本文提出的基于PCC的同步發電機勵磁調節器是以2003 系列可編程計算機控制器(PCC)為控制核心,它采用多處理器結構,其I/O處理器主要負責獨立于CPU的數據傳輸工作,而雙口控制器主要負責網絡及系統的管理,它們既互相獨立,又互相關聯,從而使主CPU的資源得到了合理使用,同時又最大限度地提高了整個系統的速度。采用基于模糊規則的適應式參數自調整PID算法為控制策略的新一代同步發電機勵磁調節器,使得調節系統能夠根據發電機勵磁系統的實際運行工況,自動調整控制參數。實際運行結果表明,該調節器結構簡單、響應快、可靠性高、便于維護,具有自適應能力以及良好的靜、動態特性和很高的可靠性。
2 PCC 勵磁調節器硬件[2 ,3 ]
PCC 勵磁調節器的硬件主要由2003 系列中的PP41 控制器,高速數字量輸出模塊DO135 ,同步整形電路,觸發脈沖放大電路,以及機端電壓、無功功率、勵磁電壓、勵磁電流等變送器和模擬量輸入模塊AI774 等組成,參見圖1。另外PCC配有RS232、RS485和CAN等多種通訊接口,與電廠監控系統信息交互非常靈活。
圖1 PCC 勵磁調節系統原理圖
Fig. 1 Scheme of excitation control system
PP41模塊是一種適應于中小型機器控制系統的小型可編程計算機控制器,它集微處理單元CPU、時間處理單元TPU、數字量輸入、數字量輸出及液晶顯示屏于一體。PP41自帶有10 個數字輸入端口,9 個數字輸出端口,并且有6 個可擴展的插槽,根據勵磁裝置的要求,在PP41的基礎上僅增加了一塊模擬量輸入模塊AI774和兩塊數字量輸出模塊DO135即可滿足PCC勵磁調節器全部功能,其中DO135用于脈沖輸出,AI774用于勵磁電壓,機端電壓,無功功率,電網電壓等模擬量的輸入,其他開關量的輸入輸出由PP41自帶的數字量端口完成。由于脈沖輸出需要TPU的支持,兩塊DO135 模塊只能插在支持TPU的第4 ,5 ,6 三個插槽上,前三個插槽供模擬量輸入輸出、通訊模塊等其它模塊使用。
同步信號接入同步整形電路,整形成方波信號后送入PP41可與TPU相連接的高速輸入端口,作為控制觸發的基準點和同步信號周期測量信號。使用PP41內部的高速計數器將觸發控制角轉化為計數值,在計數值達到控制觸發角對應的計數值時,通過TPU 的處理,無延時地發出觸發脈沖至高速輸出模塊DO135,由于脈沖的功率比較小,需要經過脈沖放大后,才能觸發功率回路。參見圖1。
勵磁調節器的數據采集通過高性能的變送器將勵磁電流,勵磁電壓,機端電壓,無功功率,電網電壓等模擬量變換為4~20mA 的電流后送入調節器的A/D 轉換模塊AI774 ,經過適當處理后,供軟件的各種處理所用。
3 PCC 勵磁調節器軟件
調節器軟件部分采用B&R 公司獨特的AB 高級語言編制,編程更方便,更利于描述復雜的控制思想。整個軟件的結構框圖如圖2。
(1) 同步信號周期測量原理
PCC模塊PP41內部具有時間處理單元TPU ,該處理單
元利用其內部6.29MHZ的計數時鐘測量輸入脈沖的頻率,PP41同步信號周期測量的基本思路是:先將同步電壓信號整形為同頻率的方波信號,該方波信號經PP41的開關量輸入接口送入PP41的TPU輸入通道,TPU讀取方波信號兩相鄰上升沿之間的計數值N ,則所測同步信號周期為
T = N/fc
式中fc為PP41內部計數器的計數頻率。
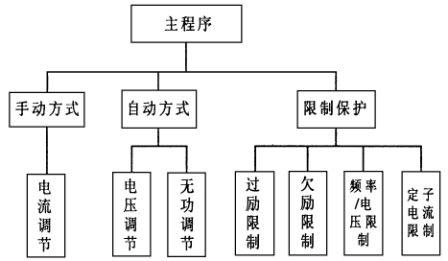
圖2 軟件功能結構圖
Fig.2 Function structure of software
(2) 觸發脈沖的產生
對勵磁系統來說,控制晶閘管導通的觸發脈沖至關重要,它最終影響著勵磁調節系統的性能和安全可靠性。本文提出的勵磁調節器利用PCC和整形電路實現可控硅移相觸發,取代了用單片機或工業控制計算機實現的可控硅移相觸發裝置,從而提高了可控硅移相觸發裝置的可靠性,減少了事故;又因該裝置的功能主要由PCC的TPU功能模塊實現,使可控硅移相觸發軟件化,更便于使用、維護及調整。通過使用PP41內部的TPU特有的功能模塊,可以形成所要求的觸發脈沖序列,其產生的過程如下:
①將用于檢測自然換流點的TPU通道D配以TPU的專用功能模塊LTXdilD(),該模塊設置為上升沿到來時無延時的向產生1號脈沖的TPU通道0發出一個鏈接信號。
②將用于產生1號脈沖的TPU通道0配以TPU的專用功能模塊LTXdO10(),該模塊設置為接到鏈接信號時延時LoFilterl后輸出一個寬HiFilter的高電平脈沖,同時在其上升沿時刻無延時的向產生2 號脈沖的TPU通道1發出一個鏈接信號。LoFilterl對應于移相角度,其值為移相角α乘以T/360 ;HiFilter 對應于觸發脈沖寬度。
③將用于產生2號脈沖的TPU通道1配以TPU的專用功能模塊LTXdoll(),該模塊設置為接到鏈接信號時延時LoFilter2后輸出一個寬HiFilter的高電平脈沖,同時在其上升沿時刻無延時的向產生3 號脈沖的TPU 通道2發出一個鏈接信號。LoFilter2對應于T/6 即60°電角度。
其余脈沖按照與3 相同的方式依次產生。

圖3 電壓PID 控制器原理框圖
Fig.3 Scheme of voltage PID controller
(3) 模糊PID 算法
目前國內外的調節器所采用的調節規律大多數是PID型,而且基本是基于電力系統在某一特定的狀態下近似線性化的模型,在電力系統或發電機組遭受干擾而使實際的運行狀態偏離設計所選的平衡點較遠,此時常規PID控制效果將會大受影響,甚至導致系統不穩定。本文所提出的基于模糊規則的變參數PID能夠隨系統的運行模式和運行狀態的變化而自動調整PID參數,以適應電力系統和發電機組不斷變化的控制要求。勵磁電壓調節器的原理框圖如圖3 所示。
圖3 中Ug 為給定電壓,Uf為機端電壓; Q為機組輸出無功功率, uk 為控制量, kf 為調差系數。
離散化后的PID計算公式為:
uk( k)= yp( k)+ yi( k) + yd( k)
yp( k) = kp·e( k)
yi( k) = yi( k - 1) + kiT ·e( k)
yd ( k) =  ·( e ( k) - e ( k - 1) )
·( e ( k) - e ( k - 1) )
其中e(k)=Ug(k)-Uf(k)-kf ·Q(k))
yp、kI 、kd 分別為比例增益、積分增益、微分增益, T 為采樣周期。
以上公式為恒機端電壓調節方式下的計算公式,在其它的控制方式下,采用相應不同的模糊輸入量對PID控制規律的參數進行調整。本文中的模糊PID就是在上述固定參數PID的基礎上,根據系統運行的實際工況采用模糊推理規則逐漸地修改PID參數,以改善調節系統的動態響應[4 ,5 ] 。其參數調整規則如下:
規則1 :如果系統輸出大于給定值,減少kI ;
規則2 :如果系統上升時間大于所要求的上升時間,且無超調,增大kI ;
規則3 :如果在穩態時系統輸出有波動,適當增大kd ;
規則4 :如果系統輸出對干擾信號反應敏感,適當減小kd ;
規則5 :如果系統上升時間過大,且kI較大,增大kp ;
規則6 :規則2的優先級高于規則5,即當上升時間過大時,先調整kI,再調整kp 。
根據以上規則,設計出用于修改kI, ki 和kd 的模糊參數調整矩陣表如下:
表1 qp 調整表
Table 1 qp adjusted table

表2 qI 調整表
Table 2 qI adjusted table

表3 qd 調整表
Table 3 qd adjusted table
kI , kp 和kd 參數按照下式進行調整:
kp = k′p + Cp ×qp
kI = k′I + CI ×qI
kd = k′d + Cd ×qd
式中Cp, CI, Cd為比例系數;qp, qI, qd為修正系數。
在qp, qI, qd的規則表建好后,只需根據偏差和偏差變化率的大小,通過查表就可獲得當前的kp、kI、kd,通過PID運算規律輸出控制。
4 電站試驗
基于可編程計算機控制器的調節器2003年10月安裝于青海富源電站,并對該調節系統進行了全面的靜態和動態特性試驗,試驗表明其性能指標滿足或優于國標的要求,其中主要特性試驗結果如下:
(1) 對機端電壓進行下擾10% ,得到擾動曲線如圖4 所示,無超調和振蕩,調節時間小于3 秒,優于國標GB/T7409.3-1997要求的。
(2) 對機端電壓進行下擾50% ,得到擾動曲線如圖5 所示,調節時間小于4 秒,優于國標GB/T7409.3-1997要求的。
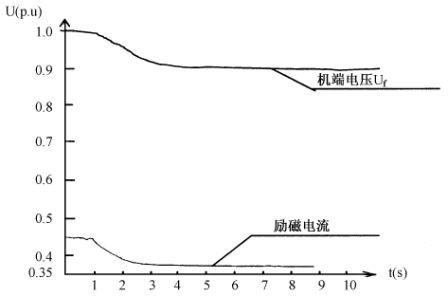
圖4 10%空載擾動曲線
Fig. 4 No-load response curve with 10% disturbance
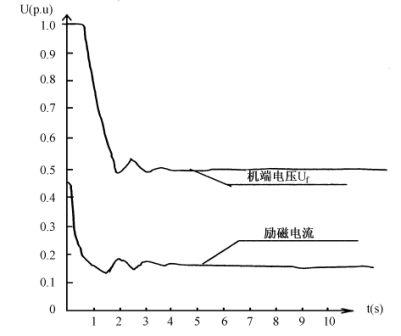
圖5 50%空載擾動曲線
Fig. 5 No-load response curve with 10% disturbance
(3) 機組進行全壓起勵,響應趨曲線如圖6 所示,圖中的電壓給定按指數曲線上升,調節時間為7 秒,無振蕩和超調,優于國標GB/T7409.3 -1997要求的。試驗后勵磁調節器即投入運行,一直運行良好。另外該勵磁調節器已先后在數十座電站運行,運行結果表明,該勵磁調節器具有很高的可靠性,快速性和穩定性,獲得了用戶的一致好評。
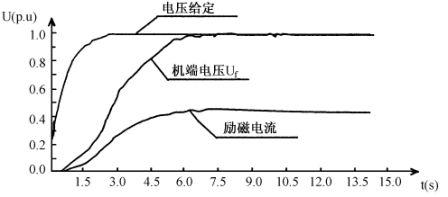
圖6 全壓起勵響應曲線
Fig. 6 Full voltage start response curve
5 結語
本文提出的基于可編程計算機控制器的勵磁調節器具有如下特點:
(1) 整形電路和可編程計算機控制器配以適當軟件完成同步信號周期測量和移相觸發脈沖形成,提高了系統的可靠性及動態品質。
(2) 采用可編程計算機控制器PCC作為勵磁調節器的硬件,其平均無故障率達50萬小時,大大提高了勵磁調節器的可靠性。
(3) 采用可編程計算機控制器PCC較之傳統的單片機勵磁調節器具有以下優點:采用多CPU并行處理,從而使主CPU的資源得到了合理使用,同時又最大限度地提高了整個系統的速度;采用多任務分時操作系統,從而使整個系統得到優化且具有較好的實時性;引進了高級語言編程技術,使編程更方便,更利于描述復雜的控制思想。
(4) 基于模糊規則的適應式參數自調整PID控制策略,實現同步發電機隨運行狀態的變化而改變控制參數,其動態特性有了明顯改善。
因此,該勵磁調節器一經推出就受到用戶的好評,有著廣闊的應用前景。
參考文獻:
[ 1 ] 曾洪濤等.高可靠智能型工業微機勵磁調節器的研制[J].水電能源科學,2000. 6 :30~40.
[ 2 ] 南海鵬.水輪發電機組PCC控制[M].西安:西北工業大學出版社,2002. 9.
[ 3 ] 周雙喜,李丹編著.同步發電機數字式勵磁調節器[M].北京:中國電力出版社,1998. 6.
[ 4 ] 章衛國等. 模糊控制理論與應用[M].西安:西北工業大學出版社,1999. 10.
[ 5 ] Leonid Reznik ,Omar Ghanayem ,Anna Bourmistrov. PID Plus Fuzzy Controller Structures As a Design Base for Industrial Applications[M] . Engineering Applications of Artificial Intelligence ,13(2000) :419~430.
作者: 南海鵬(1963年生,男,西安理工大學教授),王濤,余向陽
西安理工大學,西安 710048
