摘 要:本文簡(jiǎn)要說(shuō)明了電腦橫機(jī)的軟件數(shù)據(jù)流向及硬件結(jié)構(gòu),介紹了基于安迪交流伺服系統(tǒng)在電腦橫機(jī)上的傳動(dòng)控制應(yīng)用。給出了控制信號(hào)接線圖和關(guān)鍵技術(shù)參數(shù)的設(shè)置。
1 引言
中國(guó)是全球最大的毛衫生產(chǎn)國(guó),全球八成的毛衫制品產(chǎn)自中國(guó),這也就意味著中國(guó)也是電腦橫機(jī)最大的消費(fèi)國(guó)。電腦橫機(jī)(圖1)較之前的手搖橫機(jī)在生產(chǎn)效率和精密度上的優(yōu)越性,使之成為越來(lái)越多毛衫生產(chǎn)廠家的選擇。在人民幣不斷升值,外貿(mào)壁壘越來(lái)越多的大環(huán)境下,只有提高產(chǎn)品質(zhì)量和生產(chǎn)效率,才能使廠家獲得更大的利潤(rùn)。因此國(guó)內(nèi)對(duì)電腦橫機(jī)的需求量也會(huì)越來(lái)越大。目前國(guó)內(nèi)電腦橫機(jī)行業(yè)里,多配置兩套交流伺服系統(tǒng),用于橫機(jī)上機(jī)頭和搖床的控制,伺服作為一個(gè)精密的傳動(dòng)配套部件,將會(huì)有更廣闊的市場(chǎng)。

2 全自動(dòng)電腦橫機(jī)控制系統(tǒng)軟件數(shù)據(jù)流圖
從圖2的數(shù)據(jù)流程圖中可以看出數(shù)據(jù)在電腦橫機(jī)運(yùn)行中的流向。花型準(zhǔn)備系統(tǒng)根據(jù)衣片樣品的圖案,按照衣片的參數(shù)生成衣片控制代碼。花型文件編譯器對(duì)操作人員輸入的花型文件進(jìn)行編譯,花型文件解釋器是經(jīng)過(guò)對(duì)編譯的文件進(jìn)行解釋,把它轉(zhuǎn)化成為可以用于控制的數(shù)據(jù),并對(duì)數(shù)據(jù)進(jìn)行存儲(chǔ)和管理。控制器通過(guò)這些數(shù)據(jù)對(duì)數(shù)字IO卡和運(yùn)動(dòng)控制卡進(jìn)行控制,數(shù)字IO卡和運(yùn)動(dòng)控制卡通過(guò)取得的弱電信號(hào)控制強(qiáng)電信號(hào),直接控制橫機(jī)本體。反饋的數(shù)據(jù)和衣片信息會(huì)通過(guò)操作界面反饋給操作人員。
以工控機(jī)為中心,配以鍵盤,鼠標(biāo)等外圍設(shè)備。運(yùn)動(dòng)控制卡具有三個(gè)運(yùn)動(dòng)通道,可以實(shí)現(xiàn)三軸聯(lián)動(dòng),運(yùn)動(dòng)控制卡外接光耦隔離電路板,大部分外接信號(hào)通過(guò)該電路板,運(yùn)動(dòng)控制卡和工控PC進(jìn)行通訊。數(shù)字IO卡則用來(lái)處理大量的數(shù)字信號(hào),該卡用于控制電腦橫機(jī)的運(yùn)動(dòng)部件:選針器,集圈壓板,移圈壓板等。
4. 安迪伺服系統(tǒng)橫機(jī)控制信號(hào)接線圖和參數(shù)設(shè)置
電腦橫機(jī)運(yùn)行時(shí)是通過(guò)主伺服電機(jī)拖動(dòng)橫機(jī)機(jī)頭做往復(fù)運(yùn)動(dòng)實(shí)行編制。采用伺服和同步齒形帶驅(qū)動(dòng),機(jī)頭可進(jìn)行調(diào)節(jié)行程。一般運(yùn)行過(guò)程中要求伺服電機(jī)帶動(dòng)機(jī)頭換向平穩(wěn),無(wú)抖動(dòng)和振動(dòng)噪音,在正反轉(zhuǎn)交替時(shí)要平滑無(wú)明顯抖動(dòng)現(xiàn)象。
ADSD-S伺服應(yīng)用在電腦橫機(jī)上,包括2部分:第一部分驅(qū)動(dòng)主電機(jī)(1KW,2000RPM,130-050M20),通過(guò)皮帶傳動(dòng)帶動(dòng)機(jī)頭在床身上做來(lái)回往復(fù)運(yùn)動(dòng),第二部分驅(qū)動(dòng)搖床電機(jī)(0.75KW,3000RPM,80-024M30)通過(guò)皮帶,帶動(dòng)滾珠絲杠來(lái)移動(dòng)針板對(duì)校花紋。
以下是安迪伺服控制系統(tǒng)信號(hào)接線和參數(shù)設(shè)置。
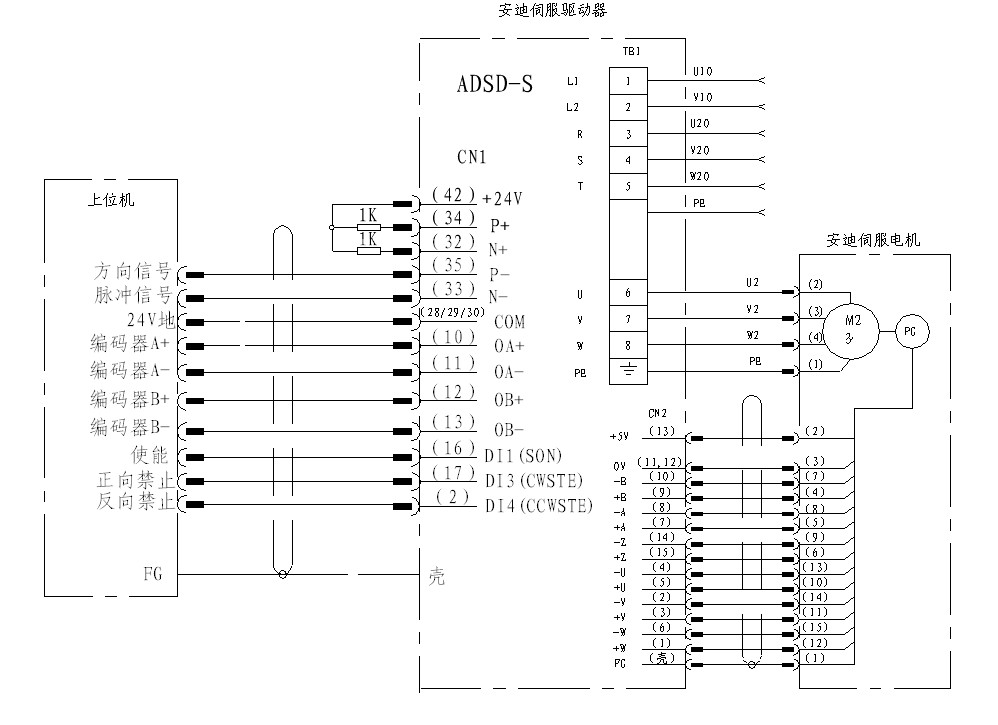
4.1 橫機(jī)中上位機(jī)與伺服接線圖
4.2 電機(jī)參數(shù)設(shè)置
主電機(jī):
B01=2 (控制模式:位置模式)
H01=2000 (正轉(zhuǎn)矩限制,機(jī)頭在換向時(shí)候,轉(zhuǎn)矩會(huì)超過(guò)額定的100%,故在換向時(shí)要提供足夠大的轉(zhuǎn)矩)
H02=E000(負(fù)轉(zhuǎn)矩限制,同上)
B00=1(脈沖型式:方向+脈沖)
B10=30 (位置回路增益,調(diào)大增益值剛性增強(qiáng),出力增大,在機(jī)臺(tái)不震動(dòng)的情況下,盡量調(diào)大此參數(shù))
B13=10 (位置平滑時(shí)間常數(shù),使機(jī)臺(tái)啟動(dòng)與停止更加柔順,減少對(duì)機(jī)臺(tái)的沖擊)
搖床電機(jī):
B01=2 (控制模式:位置模式)
H01=2000 (正轉(zhuǎn)矩限制,機(jī)頭在換向時(shí)候,轉(zhuǎn)矩會(huì)超過(guò)額定的100%,故在換向時(shí)要提供足夠大的轉(zhuǎn)矩)
H02=E000(負(fù)轉(zhuǎn)矩限制,同上)
B36=200(速度回路增益,在機(jī)臺(tái)不震動(dòng)的情況下,盡量調(diào)大此參數(shù))
B37=30 (速度回路積分時(shí)間,在機(jī)臺(tái)不震動(dòng)的情況下,盡量調(diào)小此參數(shù))
B00=0 (脈沖型式:方向+脈沖)
B10=50 (位置回路增益,調(diào)大增益值剛性增強(qiáng),出力增大,在機(jī)臺(tái)不震動(dòng)的情況下,盡量調(diào)大此參數(shù))
B13=30(位置平滑時(shí)間常數(shù),使機(jī)臺(tái)啟動(dòng)與停止更加柔順,減少對(duì)機(jī)臺(tái)的沖擊)
