安徽埃夫特智能裝備有限公司(以下簡稱埃夫特公司)是一家專門從事工業機器人、大型物流儲運設備及非標生產設備設計和制造的高新技術企業。埃夫特公司以“‘智’造自動化裝備,解放人類生產力”為己任,致力成為國際一流的自動化裝備制造商。
奇瑞汽車公司是埃夫特公司的重要客戶之一,雙方有著良好的合作關系。埃夫特機器人在奇瑞汽車等企業歷經五年的苛刻考驗和充分驗證之后,被廣泛推廣到汽車及零部件、家電、電子、機械制造、日化、食品和藥品、光電、鋼鐵等行業。
為提升奇瑞汽車的生產效率和節省人力成本,埃夫特公司曾經給奇瑞汽車開發了一臺集成某公司3D視覺相機的機器人搬運系統,用于奇瑞汽車二發生產車間的缸蓋抓取搬運,來取代過去人工搬運的作業方式。
該系統的3D視覺模式由一個2D相機和一組激光束組成,激光束采集被測物體的Z方向輪廓(即高度信息),2D相機采集平面上的信息。這種模式要求機器人具有較高精度的勻速直線運動,以配合激光束的掃描,否則會經常出現掃描不到的現象,而且多次掃描也會影響生產節拍。
奇瑞汽車給埃夫特公司反映,該套系統生產節拍較慢,相機成本較高,性價比不高,不利于在同類型生產線推廣。希望埃夫特公司給其開發一款同樣滿足其生產要求、但性價比更高的視覺抓取機器人。
但是,發動機缸蓋的抓取搬運在應用中存在兩個難題:1)發動機缸蓋毛坯件來料是在一個托盤上成多排、多列、多層碼垛,所以任意一個缸蓋在空間的XYZ面值不固定,尤其是在垂直面Z面上,還有不大于20度的傾斜,機器人抓取不能采用軌跡固定式碼垛拆跺方式,必須要獲取每一個缸蓋的坐標數據,來調整自身運行軌跡,從而達到柔性化抓取,實現柔性化搬運拆跺功能;2)該發動機缸蓋生產線是共線生產,缸蓋毛坯件品種多樣化,每一垛來料在首次搬運前,都要通過判別缸蓋毛坯件型號來切換搬運夾具。
奇瑞汽車提出需求后,埃夫特公司調研了目前世界上最著名的3D視覺制造商品牌,發現康耐視品牌在工業級視覺供應商排名中名列前茅,并且該公司在3D視覺應用上也有很多成功案例,尤其是在機器人3D視覺應用上。
于是,埃夫特公司與康耐視就此項目進行了深入交流,并展開合作。在康耐視強大的技術支持下,埃夫特公司開發出了集成Basler雙目相機和康耐視VisionPro 3D軟件的視覺抓取機器人(如圖1所示)。該系統在抓取缸蓋應用中,比前一套系統,不但在效率有大幅度提升、準確率達到100%,而且價格還有較大幅度降低。該機器人一經應用就獲得了奇瑞汽車交口贊賞,并在工博會上贏得業界廣泛的關注。

圖1
“我們在不同的光學環境中,對不同型號的缸蓋毛坯件進行了抓取測試,集成了VisionPro 3D軟件的視覺抓取機器人,均出色的完成了抓取拆垛工作。”埃夫特公司的技術人員表示,“我們甚至模擬30度缸蓋傾斜擺放來進行視覺抓取,令人驚訝的是,該機器人在各種情況下都能夠成功抓取缸蓋毛坯件。”
VisionPro 3D 軟件能夠提供準確和實時的3D位置信息,幫助改善在單獨使用2D工具時所無法滿足的視覺性能。VisionPro 3D為安裝機器人上的相機,提供了應用程序上充分的靈活性,這基于康耐視領先的PatMax技術和其他校準技術。
工作原理如下。
1)3D視覺系統由安裝在機器人末端法蘭上面的雙目工業相機、相應的數據采集卡及VisionPro 3D軟件組成。
2)兩個工業相機之間的距離與鏡頭的焦距有關,理論上距離越大越好,但考慮鏡頭焦距和圖像畸變,要求在一定范圍內,保證兩個工業相機能同時拍攝到產品和可能隨機移動的視野范圍。
3)應用VisionPro 3D 軟件需要進行視覺標定,視覺標定是使兩個相機同時拍攝一個絕對精度較高的標定板(標定板布滿20*20正方形的黑白邊緣特征明顯相間的平板),工業相機從標定板向9個或9個以上不同位置拍照,根據機器人直角坐標系下的位置,擬合相機坐標系下的3D空間,并分別反饋2D和3D誤差至用戶。用戶判定標定結果是否合格。圖像特征提取需盡量采用產品特征較明顯的特征或邊緣輪廓,一個產品可提取多個特征點進行同時判斷,可設置允許一個或兩個特征點提取不到,以提高產品識別率。
4)產品的3D信息與機器人直角坐標應保持一致,通常為X、Y、Z、A、B、C。其中XYZ為產品中心點直角坐標系下的位置,ABC為產品中心點的姿態。為保持ABC與機器人的姿態表達一致,通常為XYZ、ZYZ等歐拉角及四元素表達方式。
工作過程如下。
標定好的3D視覺系統通過雙目工業相機,來檢測待上線的一垛缸蓋毛坯產品。通過VisionPro 3D軟件提取缸蓋毛坯件的照片特征,并進行數據處理(如圖2所示),判斷產品類型與坐標數據。并根據結果,產生相應的信號與數據通過TCP/IP協議以太網傳送給機器人控制計算機,以便控制搬運機器人完成缸蓋毛坯的搬運。

圖2
具體工作流程如表1所示。
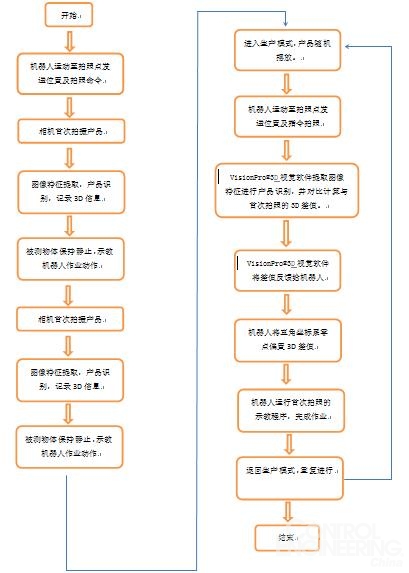
表1
集成了VisionPro 3D軟件的雙目視覺抓取機器人,大幅度降低了奇瑞汽車公司工人的勞動強度和企業生產成本,提高了效率和柔性化水平。
該系統具有良好的成本節約優勢,能對零件式樣與位置的變化進行管理,免去了成本高昂的精密夾具、機械料檔和料盤,實現了人工作業的自動化;能精確定位碼垛上的零件,延長生產線正常運行時間;并通過基本檢驗和零件識別功能提升產品質量。
“對于汽車生產廠家來說,應用了此機器人之后,我們可以很快地進行產品結構的調整,擴大產能,” 奇瑞汽車的工程師們評價道,“該款新型抓取搬運機器人具有廣泛的應用前景。”
目前,在工業機器人領域,機器視覺技術正在大顯身手。機器視覺技術與工業機器人、運動控制技術越來越緊密地結合,成為自動化領域內不可或缺的技術鏈環。在這些領域內,視覺技術的融入使運動及執行機構的反饋與控制變得更加智能化,大大提高了整個系統的銜接水平。
“在工業機器人行業,機器視覺技術主要充當機器人的眼睛,跟機器人配合用于各種產品的定位,為機器人抓取物體提供坐標信息。”埃夫特公司的技術人員指出,“這樣的組合可謂強強組合,其潛力自然不言而喻,而康耐視作為視覺行業領軍企業,其發展前景將會更為廣闊。”